В настоящее время, управление скоростью двигателей переменного тока с помощью преобразователей частоты широко применяется практически во всех отраслях промышленности. Это, прежде всего, связано с большими достижениями в области силовой электроники и микропроцессорной техники, на основе которых были разработаны частотные преобразователи. С другой стороны, унификация производства преобразователей частоты производителями, позволила достаточно сильно повлиять на их стоимость и сделала их окупаемыми в достаточно короткие промежутки времени. Экономия энергоресурсов при применении преобразователей для управления асинхронными двигателями в некоторых случаях может достигать 40% и более.
На практике, применяются системы регулирования скорости трехфазных двигателей переменного тока на основе двух разных принципов управления:
1. U/f- регулирование (вольт-частотное или скалярное управление);
2. Векторное управление.
U/f- регулирование скорости асинхронного электропривода
Скалярное управление или U/f-регулирование асинхронным двигателем – это изменение скорости двигателя путем воздействия на частоту напряжения на статоре при одновременном изменении модуля этого напряжения. При U/f-регулировании частота и напряжение выступают как два управляющих воздействия, которые обычно регулируются совместно. При этом частота принимается за независимое воздействие, а значение напряжения при данной частоте определяется исходя из того, как должен изменяться вид механических характеристик привода при изменении частоты, т.е., из того, как должен меняться в зависимости от частоты критический момент. Для реализации такого закона регулирования необходимо обеспечить постоянство соотношения U/f=const, где U-напряжение на статоре, а f-частота напряжения статора.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
К законам U/f-регулирования можно отнести законы, связывающие величины и частоты питающего двигатель напряжения (U/f=const, U/f2=const и другие). Их достоинством является возможность одновременного управления группой электродвигателей. Скалярное управление используется для большинства практических случаев применения частотного электропривода с диапазоном регулирования частоты вращения двигателя без использования датчика обратной связи до 1:40. Алгоритмы скалярного управления не позволяют реализовать контроль и управление вращающим моментом электродвигателя, а также режим позиционирования. Наиболее эффективная область применения данного способа управления: вентиляторы, насосы, конвейеры и т.д.
Векторное управление
Векторное управление – это метод управления синхронными и асинхронными двигателями, не только формирующий гармонические токи и напряжения фаз (скалярное управление), но и обеспечивающий управление магнитным потоком двигателя. В основе векторного управления лежит представление о напряжениях, токах, потокосцеплениях, как о пространственных векторах.
Основные принципы были разработаны в 70-х годах 20 века. В результате фундаментальных теоретических исследований и успехов в области силовой полупроводниковой электроники и микропроцессорных систем, на сегодняшний день, разработаны электроприводы с векторным управлением, которые серийно выпускаются производителями приводной техники всего мира.
При векторном управлении в асинхронном электроприводе в переходных процессах имеется возможность поддерживать постоянство потокосцепления ротора, в отличие от скалярного регулирования, где потокосцепление ротора в переходных процессах меняется при изменении токов статора и ротора, что приводит к снижению темпа изменения электромагнитного момента. В приводе с векторным управлением, где потокосцепление ротора можно поддерживать постоянным, электромагнитный момент изменяется так быстро, как быстро изменяется составляющая тока статора (аналогия с изменением момента при изменении тока якоря в машине постоянного тока).
При векторном управлении в звене управления подразумевается наличие математической модели регулируемого электропривода. Режимы векторного управления можно проклассифицировать следующим образом:
1. По точности математической модели электродвигателя, используемой в звене управления:
• Использование математической модели без дополнительных уточняющих измерений устройством управления параметров электродвигателя (используются лишь типовые данные двигателя, введенные пользователем);
• Использование математической модели с дополнительными уточняющими измерениями устройством управления параметров электродвигателя, т.е. активных и реактивных сопротивлений статора/ротора, напряжения и тока двигателя.
2. По наличию или отсутствию обратной связи по скорости (датчика скорости) векторное управление можно разделить на:
• Управление двигателем без обратной связи по скорости – при этом устройством управления используются данные математической модели двигателя и значения, полученные при измерении тока статора и/или ротора;
• Управление двигателем с обратной связью по скорости – при этом устройством используется не только значения, полученные при измерении тока статора и/или ротора электродвигателя (как в предыдущем случае), но и данные о скорости (положении) ротора от датчика, что в некоторых задачах управления позволяет повысить точность отработки электроприводом задания скорости (положения) .
К основным законам векторного управления можно отнести следующие:
а. Закон обеспечивающий постоянство магнитного потокосцепления статора ψ1 (соответствующее постоянству Евнеш /f).
б. Закон, обеспечивающий постоянство магнитного потокосцепления воздушного зазора ψ0 (постоянство Е/f );
в. Закон, обеспечивающий постоянство магнитного потокосцепления ротора ψ2 (постоянство Евнут/f).
Закон поддержания постоянства потокосцепления статора реализуется при поддержании постоянного отношения ЭДС статора к угловой частоте поля. Основной недостаток такого закона – пониженная перегрузочная способность двигателя при работе на высоких частотах. Обусловлено это увеличением индуктивного сопротивления статора и, следовательно, снижением потокосцепления в воздушном зазоре между статором и ротором при увеличении нагрузки.
Поддержание постоянства главного потока повышает перегрузочную способность двигателя, но усложняет аппаратную реализацию системы управления и требует либо изменений конструкции машины, либо наличия специальных датчиков.
При поддержании постоянного потокосцепления ротора, момент двигателя не имеет максимума, однако при увеличении нагрузки увеличивается главный магнитный поток, приводящий к насыщению магнитных цепей и, следовательно, к невозможности поддержания постоянства потокосцепления ротора.
Сравнительная оценка законов регулирования скорости асинхронным электроприводом изменением частоты напряжения на статоре
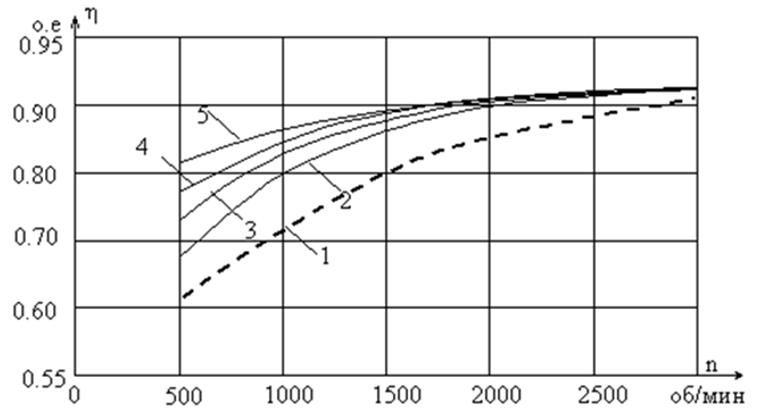
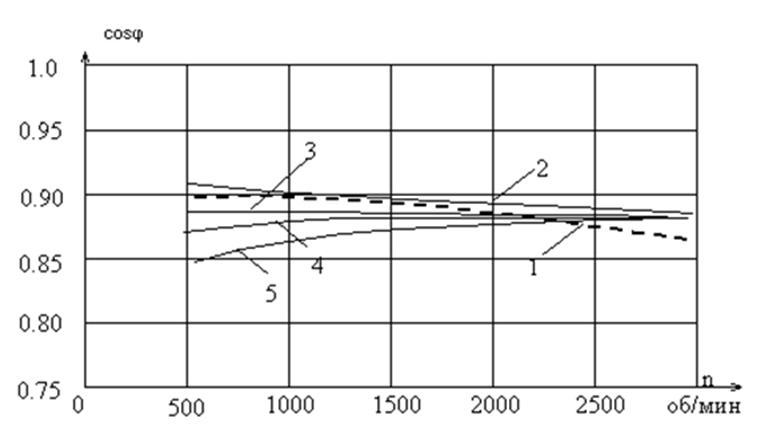
На рис.1 приведены результаты теоретических исследований энергетических показателей асинхронного двигателя мощностью Рн=18,5 кВт при различных законах частотного управления, которые проводились в работе В.С. Петрушина и к.т.н. А.А. Танькова «Энергетические показатели асинхронного двигателя в частотном электроприводе при различных законах управления». Там же даны результаты эксперимента, проведенного при испытании этого двигателя (закон частотного управления U/f = const). Двигатель работал на нагрузку с постоянным моментом 30,5 Нм в диапазоне скоростей 500 - 2930 об/мин.
Сопоставив полученные зависимости можно сделать вывод, что в зоне небольших скоростей при использовании законов управления второй группы КПД больше на 7-21%, а коэффициент мощности меньше на 3-7%. С увеличением скорости различия снижаются.
а)
б)
Рис.1. Изменение КПД (а) и cosφ (б) в диапазоне регулирования: 1 - экспериментальные зависимости; расчетные зависимости при разных законах управления: 2 - U/f = const, 3 - Евнеш /f = const, 4 - Е/f= const, 5 - Евнут /f= const.
Таким образом, законы векторного управления обеспечивают не только лучшее управление электроприводом в статических и динамических режимах, но и повышение КПД двигателя и, соответственно, всего привода. Однако все законы с поддержанием постоянства потокосцепления имеют свои определенные недостатки.
Общим недостатком законов с поддержанием постоянства потокосцепления являются: низкая надежность, обусловленная наличием датчиков, встраиваемых в двигатель, и потери в стали при работе двигателя с нагрузочным моментом меньше номинального. Эти потери вызваны необходимостью поддержания постоянного номинального потокосцепления в различных режимах работы.
Существенно повысить КПД двигателя можно путем регулирования магнитного потока статора (ротора) в зависимости от величины нагрузочного момента (скольжения). Недостатками такого управления являются низкие динамические характеристики привода, обусловленные большой величиной постоянной времени ротора, из-за чего магнитный поток машины восстанавливается с некоторой задержкой и сложность технической реализации системы управления.
На практике группа законов с постоянством магнитного потока получила распространение для динамичных электроприводов, работающих с постоянным моментом сопротивления на валу и с частыми ударными приложениями нагрузки. В то время как группа законов с регулированием магнитного потока в функции нагрузки на валу применяется для низкодинамичных электроприводов и для приводов с “вентиляторной” нагрузкой.